实际运营中对于列车的驾驶,一般会分为手动驾驶和自动驾驶,地铁司机充当的角色显然也是有着区别,下面我们先分开说一下。

图片来源网络
一、手动驾驶
对于手动驾驶这块,因为原理比较简单,所以这里直接通过一则新闻案例给大家看看大致就明白了。


上面的截图的新闻案例来自于《中国交通新闻网》,文中所提到的这位「廖师傅」的事迹目前已经被北京地铁公司做成动画宣传片在部分地铁线路的车载 PIS 上循环播放了相当长的一段时间。
短短的几分钟的动画,讲下来给人印象比较深刻的就是几个词:手动驾驶、一把对标,人车一体。
由于 13 号线的信号系统比较老,新闻中也提到目前仍然是没有采用自动驾驶模式。
所以,文中会有「列车即将进站时,为了对准安全门的位置,提前 300 米就要做准备」。
可想而知,如此精细的操作,固然地铁公司对于 13 号线肯定会有司机驾驶的专业操作规程,但如若想完成「精准停车」,可不是一件容易的事,毕竟我们的廖师傅可是拥有 104 余万公里驾驶里程的老驾驶员了!
所以,对于非自动驾驶的线路,司机师傅们的驾驶经验,也就是所谓的「手感」在「精准停车」这一行为显然发挥了不可替代的作用!

图片来源网络
二、自动驾驶
说完了手动驾驶,我们再来说说自动驾驶(ATO),毕竟当前国内自动驾驶(ATO)占据绝对的主流。
(这里就不讨论全自动无人驾驶了,全自动无人驾驶的场景是在 ATO 基础上叠加部分功能变为 UTO,不影响本题的讨论)。
在自动驾驶的场景之中,司机师傅更多的是体现了辅助监督作用,核心就是由信号系统的自动化来完成;
当然具体的执行环节是由我们上边提到的信号系统、车辆系统、制动系统共同完成的(下边的行文就从这两部分说)。
再具体一下,信号系统中主要参与动作的为 ATC(自动列车控制)子系统,车辆系统中主要参与动作的为 TCMS(列车网络控制)子系统,制动系统中主要参与动作的为 BCU(制动微机控制单元)子系统
多了不说,一个场景,一张图说明问题,干货出场!别眨眼!高能直到本题结束!
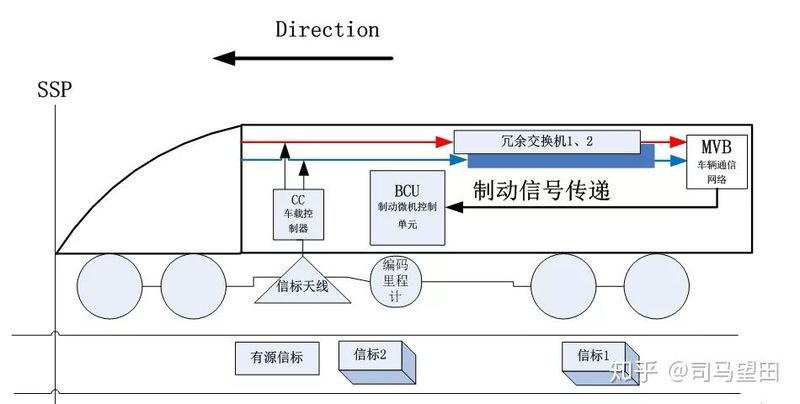
接下来,我们就死磕这张图!搞定了,本题迎刃而解!
(根据本题,「精准停车」这一场景只画出与本题有关的系统结构,无关处省略):
由于该场景与信号系统的相关性高达 80%,咱们先说信号!
1. 信号部分
A. 首先我们看上边这张图,最下边画着三个部件:「有源信标」、「信标 1」、「信标 2」。那这些东西是干嘛的,先给个定义。
这个东西我们要知道,对于我们下边的分析很重要,大家当成个背景看就行。
有源应答器:它有着一根专用的应答器电缆与地面电子单元相连接,在信号机旁边都安装有该应答器,地铁线路其它地方则视情况而定,因有源应答器有着电缆连接,所以其内部的存储信息是可以根据需要进行时时更改的,它主要传递的信息除了固定的线路信息外,还可以根据需要发出临时限速,车载信号的开闭等可变信息。
无源应答器:是没有电缆和任何连接线的一个应答器设备,其内部信息无法进行时时更改,所以它传输出来的数据都是固定不变的数据,无源应答器一般安装在区间和站台中间,它主要传递线路固定参数,例如:线路坡度,线路规定运行的速度等等。
以上引用来自于百度百科。
不过定义写的看着费劲,说的简单点:
普通的信标就是存了一些固定的信息,车上有个信标天线,专门用来「扫射」信标,因为地铁是按照固定的轨道线路运行的,所以需要知道线路的一些基本信息用来实时了解自己是处在线路的哪一段,信标起到这个作用!
当然,相比于普通信标存储的固定不可变信息,「有源信标」存的是动态信息,为啥它这么特殊,信息要变化呢?

信号机,图片来源网络
大家都知道,地铁里也有「红绿灯」,也是遵循「绿灯行,红灯停」的规则,但这个信息对于自动驾驶来说,你让俺们司机师傅用眼睛去判断显然「非常的不自动」!
所以,这个「有源信标」可以通过一定的方式实时的获取到列车进站后前方的「动态信息」。
(原理是它多了一根「小辫子」,去连接轨旁机房里的一个叫「地面电子单元」(LEU)的东西;大家都知道纯信号中有个很厉害、管理信号机、道岔、进路的「大哥」叫联锁,轨上这几样东西它门清,所以 LEU 就管「大哥」联锁要点实时信息给自个儿用用,他拿来后就能给到有源信标了)
获取完毕,这个动态信息就可以实时传给我们的 CC 车载控制器了,从而完成后续的复杂计算输出。
B. 背景说完了,那么接下来俺告诉大家,我图里紧挨着有源信标的那个「信标 2」还有个名字,比较特殊,叫做「精准定位信标」,这么一说,大家是不是有种明悟的赶脚了?
是的,我们列车在一条线路上会越过很多很多信标!比如进站前扫过的那几个,让我们知道了快接近站台了,要减速;
而我们的「精准定位信标」的作用就是告诉列车:你扫了我,你就一定得知道要施加一个多么大的制动力,必须要在多少米后让车停下,才能彻底完成精准定位!(要不不就白扫了嘛)

图片来源网络
C. 实际上,当列车到达每一个站时,想要列车「精准停车」,核心还是要让列车的车头无限接近于我们图里画的 SSP(停车点),这一点跟我们常规想象的让车门去找屏蔽门对准不太一样;
说白了,我们一直以来的最终目标,就是对 SSP!
在系统设计的过程中,我们将 SSP 设计准了,列车自动驾驶的过程中,车头最后去找的就是这个 SSP;
找到了 SSP,车门就可以和屏蔽门在误差允许范围内对准(我们的精准定位信标也会帮助校准这一过程),从而打开车门;
如果这一过程没有对准,在实际场景之中大家可以发现,列车是不会打开车门的,往往需要一个二次对准行为。
说信号是让大家知道「精准定位」的原理,接下里我们说联动。如果说信号还有那么点晦涩,联动大家理解起来就很容易了。
图片来源网络
2. 联动部分
我们的信标天线扫过信标后,需要把信息送给上层处理计算,此时,信号系统的核心老大就得登场了!他到底是谁?
CC 车载控制器!!!
(可能大家在其他新闻里看见过我,你们可以笼统的叫我 ATC,车载核心,控制核心都行)
CC 车载控制器收到小弟们给的信息后,一顿疯狂操作(这个操作我就不懂了,我也不想懂,任性一回),最终给出一个数字信号,这个信号的名字叫:停!
接下来,这个数字信号就通过我们的车载冗余网络交换机(图里有呀),然后给到了我们的 TCMS 系统中的 MVB(车辆通信网络),倒一手,毕竟在车里,还是要服从指挥,而且 MVB 的快速响应速度超好,倒这一手不吃亏呀。
MVB 拿到该信息,马不停蹄的再给到最终的执行单元,也就是我们制动系统中的制动微机控制单元 BCU(图里也有呀),这是咱制动系统最终完成制动行为的「大脑部件」,信息到了这,给到了它,最后的稳稳「抱闸」就不用担心了。
这样,相信大家已经能搞清楚,自动驾驶这:「列车为什么能自己停的这么准」了。
至此,两个部分均分析完毕。
总结一下:系统联动来准备制动行为,信号核心完成「精准定位」。


