20日,日本宇宙航空研究开发机构(JAXA)开发的SLIM小型探测器2在月球表面着陆,日媒宣称成为继苏联、美国、中国、印度之后第5个实现登月的国家,不过他们自己也承认本次落月任务“没完全成功”“刚刚及格”,因为完成软着陆后,SLIM上的太阳能电池板无法为其充电。为什么会出现类似情况呢?那可能就要和日本人自己搞出的一个奇怪设计说起——SLIM着陆时需要完成一个类似“躺平”的动作。先来看看新闻。
日本共同社1月20日称,日本宇宙航空研究开发机构(JAXA)开发的小型探测器“SLIM”20日在月球表面着陆,实现了日本登月“零”的突破。日本由此成为继美国、苏联、中国、印度之后第5个实现登月的国家。不过,着陆后太阳能电池无法发电,电池或在数小时后耗尽。目前正开展优先获取数据的作业,但也可能对原定的调查计划造成影响。
JAXA专家国中均在记者会上介绍称:“我们认为软着陆取得成功。刚刚好到及格的60分。”SLIM按计划从20日凌晨0时前后开始下降,约20分钟后降落在月球赤道南侧的“酒海”陨石坑附近。
日本《读卖新闻》21日在社论中称,SLIM的特点是体积小、重量轻,并是世界第一个展示“精准着陆”的探测器。这一点意义重大。今后,通过“精准着陆”有可能从“在能够着陆的地方着陆”变为“在想要着陆的地方着陆”。然而,此次SLIM采用新方法着陆并不完全成功,有些地方让人难以释怀。
从上述日本航天专家与媒体的口径可以看出,日本国内对于此次登月任务是非常看重的。多家日媒也纷纷提到成为“全球第五个登月国”这个点。
不过也有不少日媒在关注,为何完成了月面软着陆,但却没法充电呢?
老刘认为,可能要从日本航天器一个非常奇怪的设计说起。
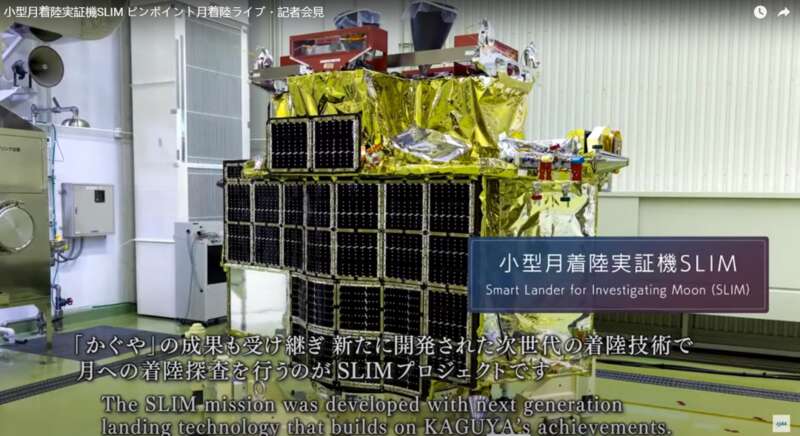
这就是JAXA在地面展示的SLIM探测器的样子。从中可以看出航天器着陆时使用的动力装置位于图片中的上部,而图片的正面则是大片的太阳能电池板。

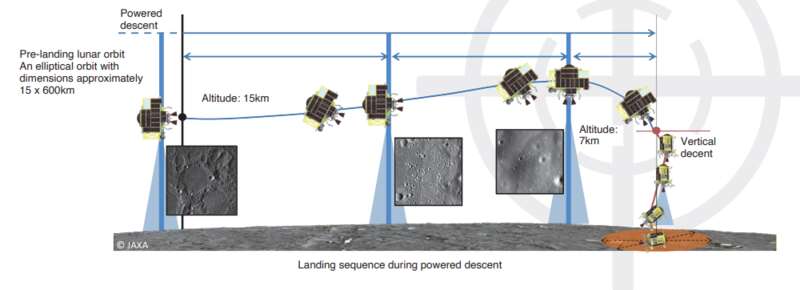
JAXA的视频解说中提到航天器是采取两个阶段着陆的方式。

下落时,发动机进行反推减速,电池板在航天器侧面。

具体到月面软着陆的节点,航天器上的主支撑脚先接触月面。需要注意,为了最大程度减缓主支撑腿着陆时对航天器带来的冲击,日本设计师采用可以压碎的特殊材料来减少冲击。

再由航天器的前支撑腿接触月面,完成整个落月的过程。
也就是说日本航天器在软着陆过程中要完成一个从垂直向下飞行变为“躺平”的动作,才能将铺满电池板的那一面正面朝上,以进行太阳能充电。
如果这样分开来说还不够直观,那就再来看看JAXA发布的落月动作的几个步骤分解图。
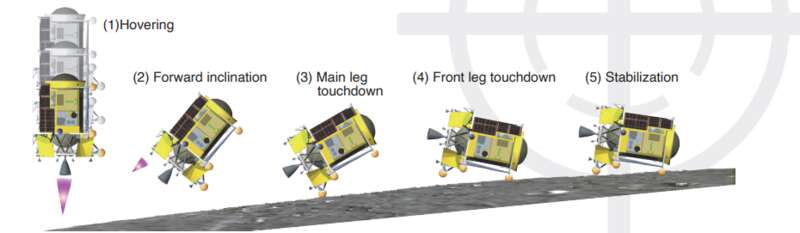
从上述演示图中可以看出,如果着陆区域崎岖不平,那SLIM着陆后的姿态也很可能会随之受到影响,使位于上部的电池板无法准确朝向太阳。
当然也有分析认为,不排除在“躺平”着陆的过程中,是否会对机载的元器件造成震动乃至损坏,使充电不能如期进行呢?这种可能有待继续观察,目前还不能盲目下类似论断。
还有JAXA官员表示,太阳能电池板并未在着陆过程中受损,故障可能是由于探测器没有指向正确的对日方向造成的。项目团队表示,蓄电池供电结束并不意味着任务结束,他们寄希望于SLIM能在某个时刻“苏醒”,假设SLIM降落在非预定地点,太阳能电池板与太阳之间的角度随着时间推移,有可能会调整到一个适合角度,这样就有可能产生逆转困境的、足够的电量,当然这还取决于SLIM能否熬过寒冷的月夜。但有地面人员表示,这种方式并不确定,因为随着SLIM电量耗尽,无法正常运行,太阳能电池板就有可能会因月球白天的高温损坏。

虽然截至目前,老刘并没有十分理解,日本航天机构采取这么奇怪的“躺平”式着陆模式的考虑是什么,也无法完全确认这一特殊设计与着陆模式是否对太阳能电池板不能正常充电构成了直接影响。相关结论还要等待日本航天机构公开更多数据与信息后再进行评估。
不过,老刘也认为,不能因为本次任务没有完全成功,就否定日本此次登月任务的意义。
日媒称,本次任务是全球首次验证误差在100米以内的“精准着陆”技术,以实现后续想降落在哪里就能降落在哪里。同时,SLIM上搭载了多美公司等开发的超小型变形机器人“SORA-Q”等两种小型机器人,此次也按计划在即将着陆前分离。两种机器人均搭载摄像头,将被用于拍摄月球表面等任务。


