水上漂,一种只存在于神秘武侠世界的轻功境界,又要降临世间。
下一位练就如此轻功的并不是人类,而是一个机器人。
用不那么中二的说法就是,它除了会直立行走,还能飞。

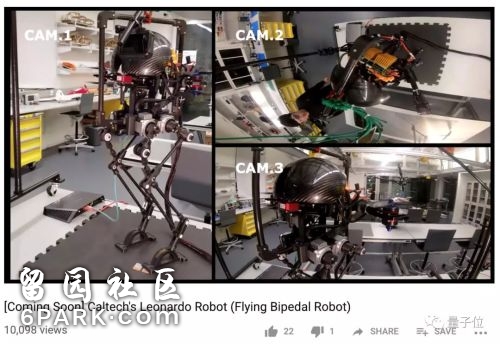
这个机器人名叫莱昂纳多,身高75厘米、体重2.7公斤,生于加州理工(谢耳朵他们学校)。
它脖子以下全是腿,头大得出奇,实在算不上英俊。
它的主要运动方式,是走与飞结合的“飘着走”。优势也显而易见。让前辈们无数次遇害的花式狗啃泥仆街之灾——

根本没机会出现在它身上。
无论是平地、山路还是水面,见势不好赶快切换到“飞行”模式,重新调整平衡就行了。
不仅不会摔,努努力还能越过高墙山坡。
等莱昂纳多走出实验室,它可能要负责把伤员送上空中救护车,或者为人类去探索崎岖的火星地表。
而在这些实用价值之外,它还是个肩负重大使命的“奠基者”——创造莱昂纳多的科学家说,它在为能飞、会跑两种机器人的结合奠定基础。
大长腿+无人机
能走会飞,如何实现?
答案就在莱昂纳多这个名字里。Leonardo可不是随口乱叫,它是一个飘逸的缩写,来自这个机器人的全称:无人机上长了腿(LEg ON Aerial Robotic DrOne)。
直立行走这项技能,显然和其他双足前辈一样,要用到它的两条大长腿。而飞行,靠的就是“头部”两侧不起眼的四个旋翼了:
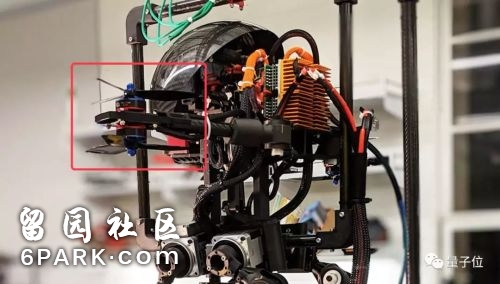
这张干净的渲染图,能把大体结构看得更清楚:

因为身体的主要成分是碳纤维,莱昂纳多很轻,只有2.7公斤。于是,四个旋翼就能轻松带着它飞离地面。
虽然它的主要任务不是飞,但是旋翼的作用一点都不小。
就算莱昂纳多只是站在此处不动,旋翼也不是个摆设。
一般来说,双足机器人要想站着不倒,两条腿要不停调整,靠着动作来保持平衡,一点也不比无人机在天上飞节能。(我们人类站一会儿也很累嘛)
莱昂纳多的站立方式就科学得多:

旋翼开动,双足着地,双管齐下抵消重力。
旋翼负责主动保持上半身平衡,和腿关节的动作协调配合,来让整个身体直立不倒。
目前,莱昂纳多还生活在实验室中,距离像波士顿动力一样出道,还需要一些时间。加州理工在展示这个机器人的视频下面,也郑重写上了“coming soon”。
不知道接下来,会有什么惊喜出现。
到底有什么用
不过,看了这么多,你可能想不到这个机器人具体能用来做什么。
一个可能的应用是火星直升机。
加州理工学院正在与NASA合作,让莱昂纳多变身火星直升机。在目前的火星探险里,在地上跑的火星车们,看到凹凸不平的路面,总要想办法越过山丘,耽误了行进速度。

而如果有火星直升机的话,这些地形障碍就不在话下了。当然,你可能需要付出稍微多一点能源,毕竟火星车停在火星表面是不费电的,直升机盘旋在空中肯定是耗电的。
另外,出于对火星考察的需要,莱昂纳多需要get更多技能。它的创造者之一Morteza Gharib说,火星直升机的概念会非常有限,需要让莱昂纳多有更长的飞行时间,并且可以稳定的采样和观察岩石。
所以,Gharib和他的团队最近一直在研究如何让莱昂纳多在粗糙的火星表面前进,以及提高莱昂纳多的供电能力。
另一个可能的应用则是无人救援直升机伴侣。
这就不得不提到加州理工此前设计的无人救援直升机,这种直升机可以飞到人迹罕至的地方,把困在野外的人救回来。

不过,这种直升机的问题在于,如果求救者失去了行为能力,他便不能自己进入到直升机里,而莱昂纳多则刚好可以把它们送进直升机。
加州理工出品
莱昂纳多是加州理工的CAST实验室的作品,它有三位爸爸:

Alireza Ramezani,他曾是加州理工的博士后,现在是美国东北大学电气与计算机工程助理教授,主要研究双足机器人、仿生机器人、航天器设计等方面。

Soon-Jo Chung,CAST实验室航空航天副教授,Bren Scholar,主要研究分布式航天器系统,空间自治系统和航空航天机器人。
Morteza Gharib,CAST实验室主任,Hans W. Liepmann航空与生物工程学教授,航空航天实验室主任,美籍伊朗人,主要研究流体动力学和航空学相关方向,也参与了生物力学和医学工程领域的研究。他曾在2015年获得美国物理学会流体动力学奖,还是美国艺术与科学学院和国家工程院院士。
会“水上漂”的莱昂纳多只是CAST实验室机器人探索的一步,他们希望创造出能够在各种不同环境中前进的探索机器人,可能是会飞、会走、会游泳的设备结合体,或许还能飞上太空。


