作者 | 李会超,哈尔滨工业大学(深圳)博士后
如果把探测器着陆月球进行科学探测看做一次攀登珠穆朗玛峰的壮举,那么从地球飞到环绕月球的轨道,大致相当于从前进营地到达了突击营地,而从环月轨道上脱离,并逐渐减速,选取安全的位置在月球表面实施软着陆,则相当于最后冲击顶峰的过程——虽然距离时间都不长,但难度风险最大,也最考验技术的有效性与可靠性。
2013年,嫦娥三号成功在月球表面软着陆,使中国成为世界上第三个在月球表面上实现软着陆的国家;2019年,嫦娥四号利用鹊桥一号中继卫星,实现人类首次在月球背面的软着陆探测。在这两次成功的任务中,嫦娥探测器在最后的月球表面着陆阶段,依靠自身的探测设备、计算机与软件算法,避开了月球表面可能对探测器着陆安全产生威胁的危险地形,在世界上率先实现了首次利用机器视觉的地外天体软着陆自主避障。
而与之对比,今年4月,以色列的Beresheet探测器在着陆月球的过程中,因发动机罢工而坠毁;9月7日,印度月球探测器“月船2号”的着陆器“维克拉姆”号,在距离月球表面两公里的地方与地面失联……这些任务的失利,都说明在月球表面着陆仍然不是一件容易的事情。
那么,软着陆地外天体,都有哪些危险?嫦娥三号、四号又是如何将它们避开的呢?

(一)能否对着陆点危险地貌进行规避,决定着月球着陆的成败
月球表面遍布各种高山深谷,而即便在相对平坦的地区,也有岩石和撞击坑等危险地貌,如果探测器降落到这些危险地貌上,很容易让探测器发生倾覆,也就是在月球上“翻车”。
在地球上,可以借助吊车等机械将翻倒的车辆扶正,而在月球上,探测器孤立无援,一旦倾覆则很难正常工作。
在美国阿波罗15号任务实施期间,宇航员们在着陆过程中遭遇了惊险的过程——由于前期意外发生的种种差错,阿波罗15号的登月舱在即将着陆之时,错误地飞入了一个撞击坑之中,登月舱支撑机构四个机械腿中的一个首先与月面接触。
在任务训练过程中,宇航员们被一再告知只要机械腿接触月球表面,就必须马上关闭主发动机,以防被发动机喷流扬起的月壤堵塞发动机喷口。然而,由于登月舱此时并非在一片平坦的月面上着陆,而是撞上了撞击坑的斜坡,因此机械腿与月面接触时,登月舱的速度并未降低到软着陆的要求。
好在这次硬着陆没有对登月舱造成损坏,而斜坡也没有使登月舱倾覆——如果这两件事的其中一件发生,阿波罗15号的宇航员可能就回不来了。

(阿波罗15号登月照片,可以看出其登陆点的地势并不平坦)
在他们之前,在阿波罗11号首次载人登月时,阿波罗11号的月面降落过程也是惊险连连,阿姆斯特朗在一片飞控计算机过载的警报声中操控登月舱着陆,登陆所需的燃料在登陆30秒前耗尽,好在他们同样顺利地到达了月球表面。
看到这里,可能很多人会有疑问,探测器都会搭载很多高精尖的仪器,难道不能获取影像资料来提前判断着陆点的地貌么?答案是,在此前的很长一段时间内,即便是如美国LRO这样搭载了高分辨率相机并长期在环月轨道上工作的探测器,也无法获取足够高分辨率的影像,来让探测器提前获知着陆点的精准地形地貌信息。
因此,探测器在着陆过程中必须自主获取信息,对危险的地貌进行规避,才能安全地在月球表面着陆,这是事关探测器安全的重大问题,也是决定月球着陆成败的关键技术点。
(二)粗避障+精细避障,让探测器稳稳地降落月球表面
在美国阿波罗计划进行的过程中,宇航员依靠人力完成危险地貌识别,宇航员经过训练后,能够在登月舱着落过程中发现危险地貌并操纵飞船避开它们。
在更早之前,美国和苏联在月球表面的无人探测器,有的预先选择一片大致平坦的区域作为着陆区,而探测器在着陆点是否会碰到未能识别的危险地形,则全靠运气和缘分,失败的概率较大;有的则以气囊作为缓冲,抵消危险地形的可能冲击,之后再将探测器释放出来。
而当阿波罗计划结束后,月球的探测陷入低潮,再没有关于着陆技术的新突破,美国在进行火星探测的过程中,也大都依靠气囊作为着陆缓冲。
如今,中国的嫦娥三号、四号飞船的自主避障技术,则将探测器在行星表面着陆的技术水平向前推进了一大步。
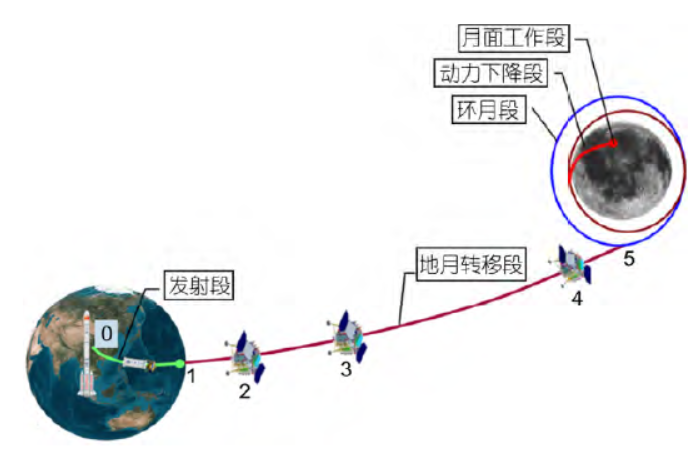
(嫦娥奔月的总体过程)
在着陆月球前,飞船会先进入环绕月球的轨道,等待合适的着陆时机;着陆过程开始后,飞船会先利用自身的发动机减速,脱离绕月轨道,逐步降低高度;在距离月球表面约2.4公里时,探测器开始避障的第一阶段——粗避障。
如果我们将探测器在月球表面的着陆看作是一次停车入位的话,粗避障过程就相当于在停车场中寻找车位的过程。探测器利用自身搭载的光学成像敏感器对潜在的着陆区域进行成像,在拍摄的“照片”中识别出比较大的危险地形与障碍物,将它们从备选的着陆区域中剔除。
同时,由于飞向不同的区域,发动机的工作过程可能不同,对燃料的消耗就有可能不同,因此探测器在确定着陆区域时,还要保证安全的前提下尽量选取燃料消耗较少的着陆区域。
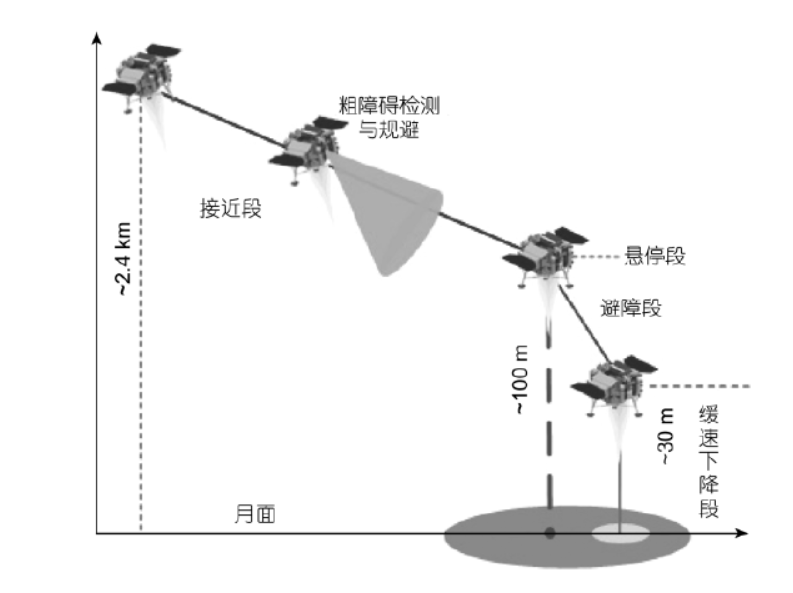
(嫦娥探测器最为关键的避障阶段的飞行过程)
在进行粗避障搜寻过程的同时,探测器本身处于减速下降的阶段,因此,对粗避障过程一个苛刻的技术要求是,无论是对月球表面拍摄“照片”,还是利用探测器搭载的计算机与有关算法程序识别障碍、选取着陆区,都必须在较快的时间内完成。在这一阶段采用光学传感器,就是看中了它能够在运动过程中快速成像的特性。而相关的程序和算法,则经过科研人员大量的优化试验,能够满足需求。
之后,按照粗避障过程所选取的着陆区,探测器控制发动机接近到月球表面的特定区域,并悬停在距离月球表面约100米的位置,此时,在与月球表面保持相对静止的状态下,三维激光敏感器开始对着陆区进行扫描。
与光学相机只能得到一张二维的照片所不同的是,极光敏感器可以获得着陆区域的三维信息,月球表面的高低起伏全都能够定量地刻画在探测器的“大脑”中。
之后,探测器的计算机开始在图像中搜寻符合着陆条件的最优区域,精准确定着陆点。
再之后,探测器一边下降,一边向确定的着陆点移动。
在到达着陆点正上方、距离着陆位置为30米时,探测器将自己的水平速度调整到0,只在垂直的方向上向下缓缓移动,最终着陆到月球表面。
这个被称为“精确避障”的过程,类似于我们找到车位之后,通过后视镜观察确定车身与车位间的相对位置,驾驶车辆进入车位停妥的过程。
(三)NASA还在研制的技术,嫦娥已在实战中验证
那么,嫦娥三号和嫦娥四号是如何把障碍区域从二维和三维图像中识别出来的呢?
岩石从月面上凸出,撞击坑从月面上凹陷,在阳光的照耀下,这两个区域将出现与平坦月面不一样的图像特征,岩石表面的亮度大于月面背景,且附近存在阴影区。亮区和阴影之间的明亮对比比较强烈,且亮区与暗区之间的交界线刚好与太阳光射来的方向垂直。
而对于撞击坑来说,同样存在比较明显的明暗对比。撞击坑被太阳照到的部分较亮,照不到的则较暗,而撞击坑暗区的边缘呈现圆弧状,能够与岩石区分开来。
根据这些特征,嫦娥探测器的计算机就能使用有关程序和算法,从光学成像传感器中识别出图像中的危险区域,将它们从待选的着陆区中剔除。
在精确避障过程中,激光敏感器传回的是不同位置的高度信息,嫦娥探测器的计算机可以利用这些信息计算描述各个位置平坦程度的坡度,挑选一个高度适合又比较平坦的区域,选为最终的着陆点。
也许你会问,既然我们可以通过电视直播看到嫦娥探测器着陆月球表面时的场景,为什么不能通过地面上的人员操控嫦娥探测器着陆,而必须依靠嫦娥探测器上的自主避障功能呢?
这是因为,即便地面上的控制人员能够瞬时对着陆过程做出精准而正确的控制,他看到的也是1秒之前嫦娥探测器所处的环境。电磁波以光速从月球传到地球,需要1秒的时间,而控制人员的指令传回嫦娥探测器,又需要1秒,对于一般的活动,2秒仅仅是微不足道的一瞬间,而对于落月的嫦娥探测器,在仅仅700秒内,她就要从环绕月球高速运行的状态变化到稳稳地在月球表面着陆的状态,其间它的位置和速度都经历着非常快的变化。2秒的理论延迟都显得太长,何况实际上的延迟还会超过2秒,因此,必须为它开发自主避障的功能。
这种技术同样得到了NASA的重视。今年9月,NASA的新闻稿中公布了SPLICE( Safe and Precise Landing – Integrated Capabilities Evolution,安全与精确着陆——协同技术发展)项目的进展,这个项目的目标也是实现探测器在其他天体着陆过程中的自主避障,但目前仍处于研制测试阶段,没有像嫦娥一样在实战中进行验证。
也就是说,虽然我们来到月球比美饿两国晚了不少时间,但我们着陆月球玩出了一种十分有价值的“新花样”。
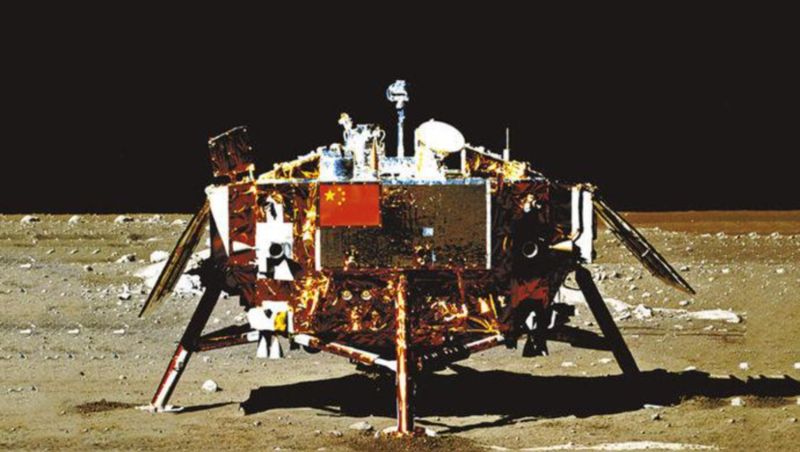
(落月后的嫦娥三号,可见附近地形平坦,没有大的石块与沟壑,探测器状态良好,避障工作相当成功)
虽然航天器是一个没有生命的机械,然而她的身上倾注了太多人的心血和期望。据探月工程总设计师吴伟仁院士回忆,当嫦娥4号探测器和玉兔2号月球车出厂时,按照工程师们给出的设计和图纸,亲手将航天器制造出来的工人师傅们,像送别出远门的孩子一样抚摸着嫦娥4号和玉兔2号,嘱咐她们“要听话,一路走好,不要走偏了,不要摔下去了”。
像每一个长大后离家的孩子一样,嫦娥探测器也需要凭借着她自己的力量来走好自己的路。

(嫦娥四号使人类第一次从月球表面看到了月球背面的景象)
在距离地球38万公里的月球表面,在中国乃至全世界的航天器都未曾涉足的地方,在极寒极热的交替和宇宙线的轰击中,在那最惊险的700秒里,托举她的不只是那台最多能够输出7500N推力的变推力主发动机,还有无数为她苦思冥想与夙兴夜寐的航天人们。


