
图片来源:Almabes via Wikimedia Commons
虽然不一定踏着七彩祥云……
蟑螂是不可阻挡的。
它们拥有惊人的运动能力。就拿马达加斯加蟑螂(Gromphadorhina portentosa)来说,身长大多在5-7.5厘米,但最高奔跑时速接近5公里,相当于每秒1.3米。假如你感觉不到这有多快,换算一下,大概就像人类以160公里的时速飞奔那样。
速度只是一方面。除此之外,马达加斯加蟑螂也和许多蟑螂亲戚一样,拥有灵活伸缩的外骨骼,可以帮助它们把身体挤压到适宜的尺寸,在狭小的空间里自如穿行。
这些优异的运动性能,令大小相近的机器人难以企及,自然也会让科学家着迷。不少研究者喜欢将马达加斯加蟑螂改造成赛博格(cyborg),然后用自己的方式来操控这些半生物半机械的蟑螂。科学家们想象着有一天,当危险的灾难发生时,一些改造后的蟑螂能潜入人类或传统机器人难以涉足的复杂地形,执行搜索或救援任务。
最近,来自日本大阪大学的一组研究人员,又找到一种新的方式,来支配马达加斯加蟑螂。他们开始用AI来增强蟑螂对陌生领域的探索能力了。
不想运动,也得运动
比起明亮的地方,蟑螂更喜欢待在黑暗的环境。假如你打开家里厨房的灯,看到蟑螂四散奔逃,它们可能也是在跑向自己的舒适区。科学家看好这类夜行生物,毕竟许多搜救工作需要在缺少光亮的情况下进行。
不过,在大阪大学的森岛圭佑教授眼里,蟑螂在黑暗中的运动习惯,还有不少可以改善的空间。比如,有些蟑螂从明亮的世界走进暗处之后,会先休息一段时间(减少运动或几乎不运动),而不是立刻积极地行动起来。森岛教授说,如果要在一处废墟或未知的环境里,部署一台实时监控的摄影机,蟑螂这样的自然行为就可能阻碍它的工作。
森岛和他的同事们希望,当蟑螂进入黑暗地带后,能早一点开始探索自己周围的空间,行动的范围也要尽可能扩大。于是,研究小组决定给蟑螂植入电极,利用这些电极向动物发出电刺激,促使它们运动得更多。
科学家选中了3只雄性马达加斯加蟑螂成为赛博格。每只蟑螂被植入了3个铂电极,一个植入到胸部,一个植入到左侧尾须,一个植入到右侧尾须。
先前有其他研究者发现,在蟑螂行走过程中,对它的左尾须发出电刺激,蟑螂会向右转,刺激右尾须时蟑螂会向左转;假如同时刺激左右尾须,蟑螂则会加速运动,效果显著。

上图为左转右转,下图为加速(图片来源:参考资料3)
而这一次,大阪大学的研究小组希望通过刺激两根尾须,来促进蟑螂的自由运动,而不会代替它们决定运动的方向。
重要的是,科学家不想每时每刻都刺激蟑螂。森岛教授说:“我们不需要像操控机器人那样操控赛博格,它们可以有一定的自主权,这也是它们敏捷运动的基础。”那么,只在必要的时候发出刺激就可以了,在这项研究里,必要的时候就是蟑螂停下的时候。
如果想在对的时机发出电刺激,使不动的蟑螂运动起来,就必须了解它们的实时运动状态。为此,研究者让蟑螂背上了一个“背包”,背包装有惯性测量单元(IMU),用来测出它的加速度和角速度,这些数据是判断运动状态的重要线索。(马达加斯加蟑螂没有翅膀,刚好适合背包,在制造赛博格的科学家看来,这些蟑螂不会飞并不是个缺点。)
但对追求准确的研究者来说,只靠IMU还不足以确定蟑螂的运动状态,因为它会有偏差和噪声。所以,科学家要用机器学习算法来分析IMU数据,更好地判断蟑螂有没有停下脚步。他们训练了几种不同的AI,包括支持向量机(SVM),K近邻算法(KNN)、逻辑回归(LR)和朴素贝叶斯(NB),看哪种方法的准确度最高。
每个AI都要根据IMU数据,来预测蟑螂是停着还是走着。至于它们的预测是否正确,只要跟摄像头拍下的内容对比一下就会知道。结果,支持向量机(线性)从几种算法中胜出,在蟑螂运动和蟑螂没动的情况下,它预测的准确率都是最高的。
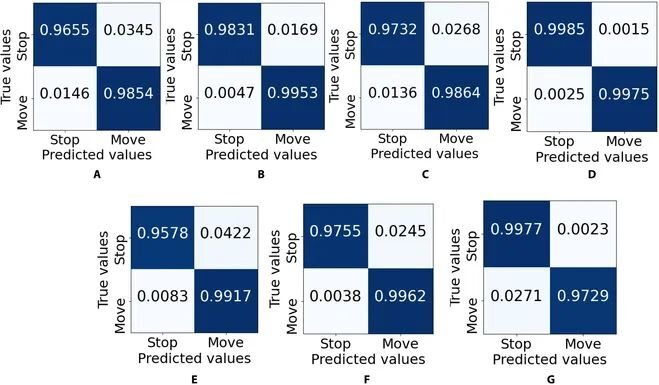
D为线性支持向量机(图片来源:原论文)
那么,就依照这只AI的判断,来指挥电极向停下的蟑螂发出刺激吧。科学家把每一只植入了电极的蟑螂放进一个圆形运动场,当AI认为它没有走动,它的尾须就会受到电刺激。蟑螂每次要在圆形运动场里待7分钟,这是科学家留给它探索运动场的时间。时间结束之后,研究者会评估它探索了多少:比如搜索了多大区域(以网格数计算),行走了多长的距离,有多少时间在行走等等。然后,和没有施加电刺激时的7分钟探索程度做对比。
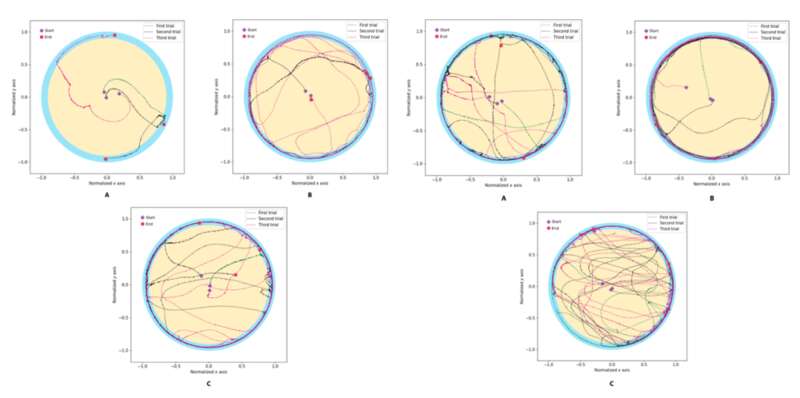
3只蟑螂的行动轨迹。左为无刺激自由行,右为施加刺激后(图片来源:原论文)
其实,那3只被选中的蟑螂,对运动的热情并不相同。在没有电刺激的情况下,1号和2号蟑螂不太活跃,3号蟑螂最活跃;在接受了电刺激的情况下,3号蟑螂仍然最活跃。但即便个体与个体之间有差异,施加电刺激之后,每一只蟑螂都变得比先前更活跃了。总体看来,与没有电刺激的时候相比,按照AI指引接受电刺激的蟑螂,区域搜索率增加了68%,行走距离增加了70%,休息时间减少了78%。
这个结果让研究人员感觉到,依靠刺激尾须来扭转蟑螂的自然行为是可行的。让它们在原本不想运动的情况下增加运动,这对搜救场景而言十分重要。
也许你会感觉,成为赛博格的蟑螂们,休息时间被剥夺得很严重。不过研究者却说,有了AI的帮助,可最大限度地减少蟑螂受到的刺激,避免它们因为刺激过多而疲劳。
想要逃跑也越来越难
这项新的研究,只是测试了蟑螂的运动习惯能不能适应搜救任务。
但在如此特殊的场景下,应该还有其他值得考虑的问题。比如,赛博格蟑螂需要用电,在难于及时充电的严峻环境里,如何能让它们坚持工作数天甚至数周,也是科学家一直在关心的事。
2022年,日本理化学研究所(RIKEN)等机构的研究者,也把马达加斯加蟑螂改造成了赛博格。这些蟑螂同样背着包,包里装着所有电子设备,并有电线将控制器与蟑螂的腿部相连,让科学家能够用电流操控蟑螂向左或向右。但除此之外,科学家们还在蟑螂腹部贴上了超薄的太阳能电池模块。它的厚度只有0.004毫米,却能提供17.2毫瓦的功率输出。这样,或许可以在一定程度上避免蟑螂丢弃任务逃跑。
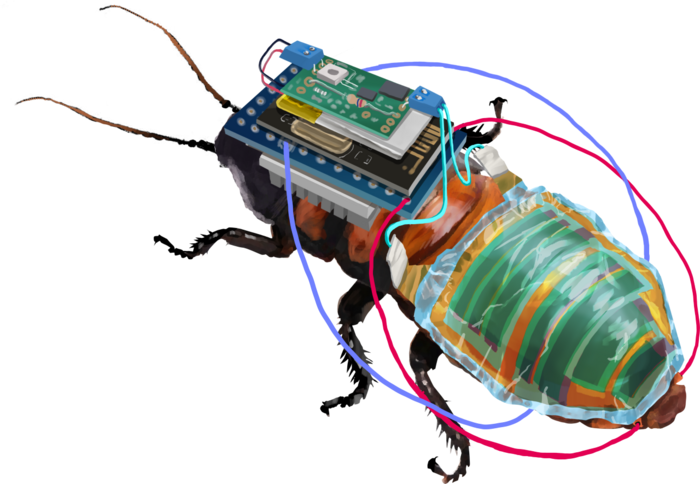
电线连接着控制器与蟑螂的腿(图片来源:参考资料4)
太阳能发电,只是其中一种思路。2014年,森岛教授和同事们还尝试过利用蟑螂的体液来发电。那次,他们制造的赛博格蟑螂,背上就驮着生物燃料电池(BFC)。这种发电装置将蟑螂体液中的海藻糖(trehalose)作为能源,当海藻糖扩散到装置中,那里的海藻糖酶(trehalase)等可以把它分解为葡萄糖。葡萄糖被固定在电池的负极,并被氧化;而正极则有氧分子被还原为水。在此过程中产生了电子交换,依靠这种原理发电,输出功率最高达到了50微瓦,而10微瓦的输出功率则可以保持3小时以上。科学家利用蟑螂体液发电,实现了每5秒点亮一次LED灯,以及测量温度并每100秒向外传输一次数据。
那时研究者说,体液中的杂质如蛋白质与脂肪等等影响了发电效率。如果能改善过滤装置,电池的功率还会提升。
问过蟑螂的意见吗?


