智东西6月4日消息,近日,一个不使用吸盘结构、也没有粘性介质的攀爬机器人引起了外国媒体的关注。这种机器人的电机通过振动,会产生1层不到1毫米的气膜。凭借这层气膜对光滑表面的吸附,机器人可以在墙面或者天花板上活动,还能负载大约一罐汽水的重量。相比其他的攀爬机器人,该机器人重量更轻,成本和功耗也更低,在高空作业中具有很大的应用空间。
该研究由美国加州大学圣地亚哥分校仿生机器人设计实验室(Bioinspired Robotics and Design Lab)完成,发表在美国顶级学术出版商Wiley旗下的Advanced Intelligent Systems期刊,论文名称为《振动产生的气体润滑使机器人粘附(Gas-Lubricated Vibration-Based Adhesion for Robotics)》。
论文链接:
http://onlinelibrary.wiley.com/doi/full/10.1002/aisy.202100001
一、借助低压气膜,完成低功耗附着
随着机器人技术的不断发展,目前已有多种机器人具备可控粘附能力,也就是机器人可以选择性地附着或脱离墙体等表面的能力。这些方法往往依赖于机器人与表面之间的气动、电磁或干纤维等。
本论文作者称,虽然这些方法比较有效,但是这些机器人通常需要沉重、高耗能的组件才能实现可控粘附。
为此,美国加州大学圣地亚哥分校的研究人员们希望开发出一种重量更轻、功耗更低的粘附设备,可以使机器人在不适合人类的环境下进行检查、维修、监视和探索等任务。

靠气膜粘附的机器人
在谈到设计思路时,研究人员称,考虑到机器人在光滑表面的移动,非接触或轻接触(即机器人不直接粘附表面)模式较为有利。之前的一些研究大多选用电磁粘附,其粘附力较强、功耗较低,但是也存在很多问题。
具体来说,电磁粘附的性能在粗糙的表面会有所下降,也更容易在粘合界面上积聚灰尘。此外,电磁粘附需要高电压工作,使其便携、安全和小型化有很大的挑战。
最后,研究人员选择了偏心转子马达(ERM)作为机器人的吸附装置。这种电机可以带动1个直径14厘米的软盘产生200Hz的振动。借助这种振动,机器人和表面之间会产生一层几百微米的低压气膜,为机器人提供足够的附着力。
二、机器人可负载3.8N物品,或在竖直曲面移动
在选定粘附方式后,研究人员构建了两个系统。一个是振动源和软盘组成的粘附系统,主要研究通过气膜进行粘附的机制;另一个则是驱动装置,为机器人提供平稳的移动。
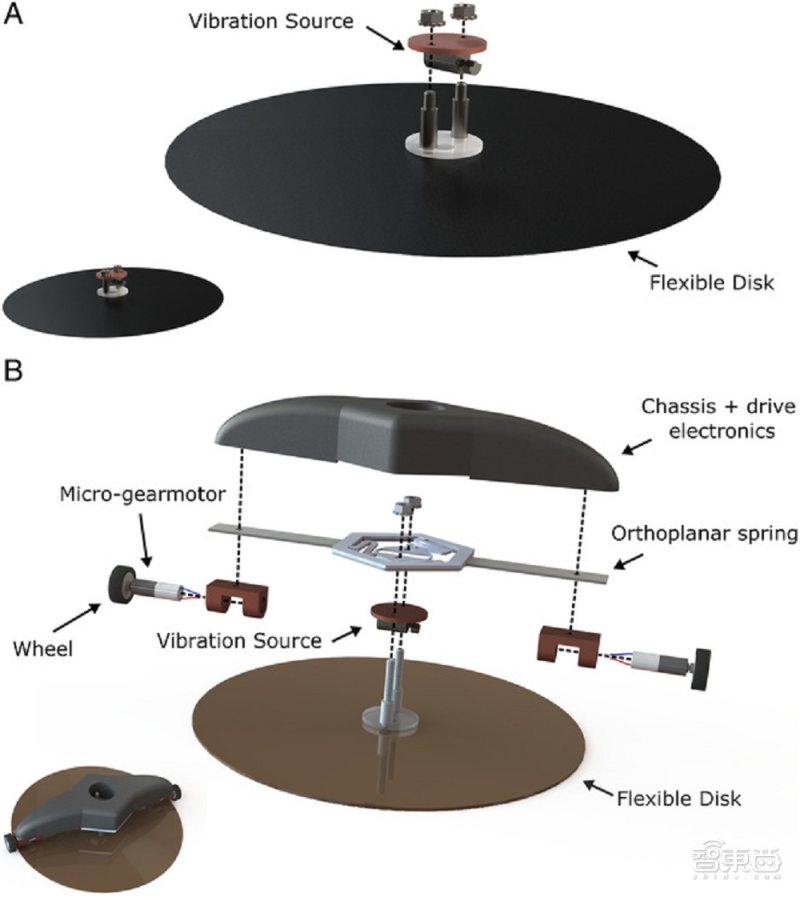
机器人两部分拆解图
在完成理论设计后,研究人员将两个系统组合起来,分别进行了有效负载、垂直移动和曲面移动三项测试。
第一个实验有效负载实验,展示了该机器人在仓库和家庭等低成本系统中的应用潜力。
通过动图我们可以看出,该机器人可以钩住约为3.8N(一罐汽水)的负载,并在天花板上进行前后左右移动。
机器人在钩住一罐汽水
第二个实验是让机器人攀爬垂直表面。研究人员将机器人放置到一个木柜的表面进行测试。
根据实验图像,由于机器人可以提供足够的摩擦力和附着力,所以实现了垂直攀爬。
机器人在竖直木柜表面行进
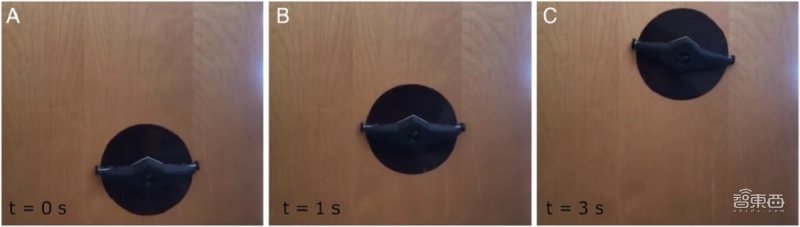
之后,为了测试机器人在非平面表面的行动。研究人员使机器人绕着一个直径为0.9米的竖立圆盘内部移动。机器人花费56秒成功完成了这一测试。
在这一实验中,机器人在不同位置的耗时直观地体现了不同曲面环境的难度。机器人在圆盘的前半程花费了42秒,而后半程则大约只花费了14秒,说明对抗重力对机器人来说更加困难。
机器人在曲面圆盘上行进
三、无法附着粗糙表面,或可应用于水下环境
在论文的最后,研究人员称,这项研究对于机器人有着重要的意义和发展前景,但是也存在一些问题。
首先,这个机器人仅能粘附在如金属板、玻璃、塑料等相对光滑的表面,无法附着在石头、砖墙、开孔泡沫等粗糙的表面上。经过研究,科研人员发现振动产生的流体气膜厚度需要控制在800μm之下,而粗糙的表面会增加气膜厚度,限制机器人的可支撑负载。
同时,由于振动频率在人耳可听频率之内,并且该机器人的工作噪声较大,不适合在有人居住的地方使用。
另一方面,科研人员也无法确定其流体膜的工作原理能否用于水下环境。如果液体介质可以替代气膜,这种机器人将会迎来更大的应用前景,开辟水下粘附应用。值得一提的是,这项研究还得到了美国海军研究办公室的支持。
结语:实验展示了气膜粘附的可行性
当前,高层建筑的玻璃清洁、高架电网设施的维护等工作仍需要人们冒着较高的风险进行作业。而此前的很多攀爬机器人,无论是重量、成本还是能耗上都存在问题,无法替代人工作业。
本次的研究在重量和功耗上都有提升,也展示了气膜粘附在攀爬机器人方案中的可行性,推动了这类机器人的发展。


