提起机器人,我们印象里无论是美国波士顿动力研究出的可以跳舞翻滚机器人,还是科幻电影里的机器人管家,它们虽然可以做到模仿人类行走或者一些诸如摔倒起身等复杂的动作,但是它们无论如何仿生人类,我们看起来都是机械感十足,毕竟都是电动机+齿轮组合起来的智能机器人,它们和人类这种肌肉带动起来的动作还是非常有差距的。

不过,日本东京工业大学研究出的一种仿生机器人,可算是机器人界“泥石流”般的存在,不仅打破了原有机器人通过电机齿轮来驱动的传统模式,甚至让人一度怀疑真正仿生机器人是不是一开始研究的方向就错了,这个东京工业大学研究出的仿生机器人到底有多天马行空呢?

没有电机齿轮的机器人,它却动了起来
2014年的时候,日本东京工业大学就向外界透露出已经成功研制出可以模仿人类肌肉纤维动作的纤维管,当时这一消息并没有引起太大的轰动,因为在仿生科学领域,成功模拟出了生物身上的特性并不是什么大新闻,但是随后,这个大学将这一研究成果付诸实践的时候,所有人惊呆了,令人难以置信的是,他们研究这种可以模仿人类肌肉纤维的纤维管,竟然依靠人造肌肉来制造仿生机器人。

这个机器人的骨骼是按照人体骨骼结构合成出来的,除了质地较轻以外没什么特殊的技术含量,关键是机器人身上的“肌肉纤维”,我想没有人以前认为一把把橡胶管就能带动骨骼运动,但是这所大学的研究人员做到了,他们用一种纳米级的网状合成纤维附着在1.2毫米的橡胶软管上,一把把的橡胶软管完全模拟人体不同的肌肉群,通过不同捆束的橡胶软管之间的相互配合,做到了踢球、抬胳膊等高难度的动作。
虽然这个机器人目前来看还有很多的不足之处,比如说整个骨架依靠一根绳子吊起来才能保持直立状态,动作虽然可以做到,但是特别的迟缓,动作的精确度也没有机械传动来的准确,甚至所有的动作幅度都有随机性,很多人觉得并没有什么实际应用的意义,但是,恰恰就是这个看似“脑洞大开”的设计,却是机器人从硬邦邦的电机齿轮向柔软的仿生人类迈出的一大步,毕竟谈论一个婴儿的强弱本身就没有意义。

这神奇的人造肌肉是什么工作原理
人造肌肉这个概念其实在20世纪40年代就已经出现了,不过当时只是一个大概的课题,研究进展真正突飞猛进的还在近十几年,原因是很多的特殊聚合体材料和智能材料如雨后春笋般研制成功,让人造肌肉有了实践的可能。
所谓的人造肌肉,就是一些材料在通电后表现出诸如伸缩、弯曲、扭动等各种复杂的状态,这些材料活动起来很像自然界的肌肉,因而有了这个称呼,准确的说,这些新型智能高分子材料叫做电活性聚合物更为贴切。
电活性聚合物主要分为离子型和电子型。电子型电活性聚合物是通过直流电场直接使材料发生变形动作,但是缺点是在收缩后需要比较大的电压来使材料恢复原状,而离子型电活性聚合物是由两个电极和电解液组成,通电后根据离子的偏移来改变形状,缺点是需要保持一定湿润度以及变形程度不可控。
这下就理解了,为什么日本东京工业大学能通过一些橡胶管束,就能控制骨骼运动了,全都拜电活性聚合物材料所赐。
我国目前人造肌肉的研究水平如何
看到日本能造出这样有想象力的仿生机器人,很多人会关心我国目前在这领域属于什么水平,值得骄傲的是在电活性聚合物材料领域我国一直没有掉队。
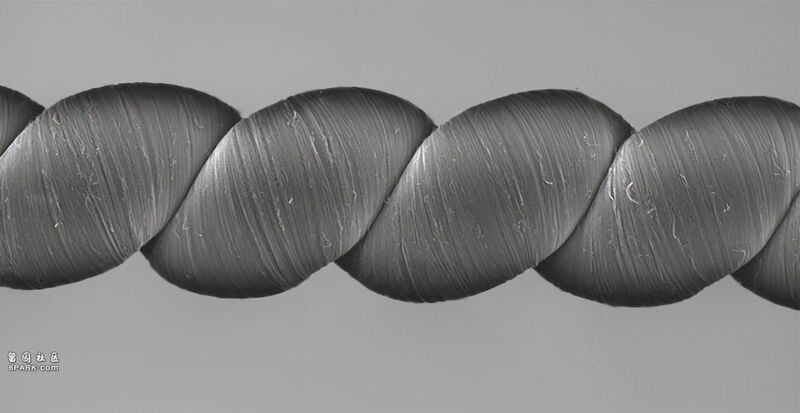
2019年的一期《科学》杂志刊登了一则美国、中国等科研团队合作开发的一种新型人造肌肉,这种新型聚合材料由碳纳米管等材料通过“加捻”等工艺制作而成,通过附着在多种纺线上形成一种活性壳状涂层,通电后,在只需要激活活性壳状涂层,就可以驱动整个纺线。相比于以前需要激活整个纺线,这种工艺响应速度更快、耗能更低、强度更大、选材更灵活,做到了平均收缩力是人体肌肉的40倍的巨大强度。
2021年1月29日,哈尔滨工业大学等一些列国内外大学又通过改进离子型电活性聚合物,将碳纳米管原有的双极驱动,改造成了单极驱动,不仅解决的传统双极驱动碳纳米管电容限制的问题,还大大降低了能耗,提高了效率。

结语
未来,随着人造肌肉的不断发展,仿生机器人做到和真人一样灵活自然也不是不可能的事情,虽然技术现在相对来说比较落后,但是举个例子,当年莱特兄弟发明飞机的时候,他们会想到如今的飞机能发展到如此程度吗?还是那句话:谈论一个婴儿的强弱本身就没有意义。


